
 当前位置:首页 > 科研团队
当前位置:首页 > 科研团队
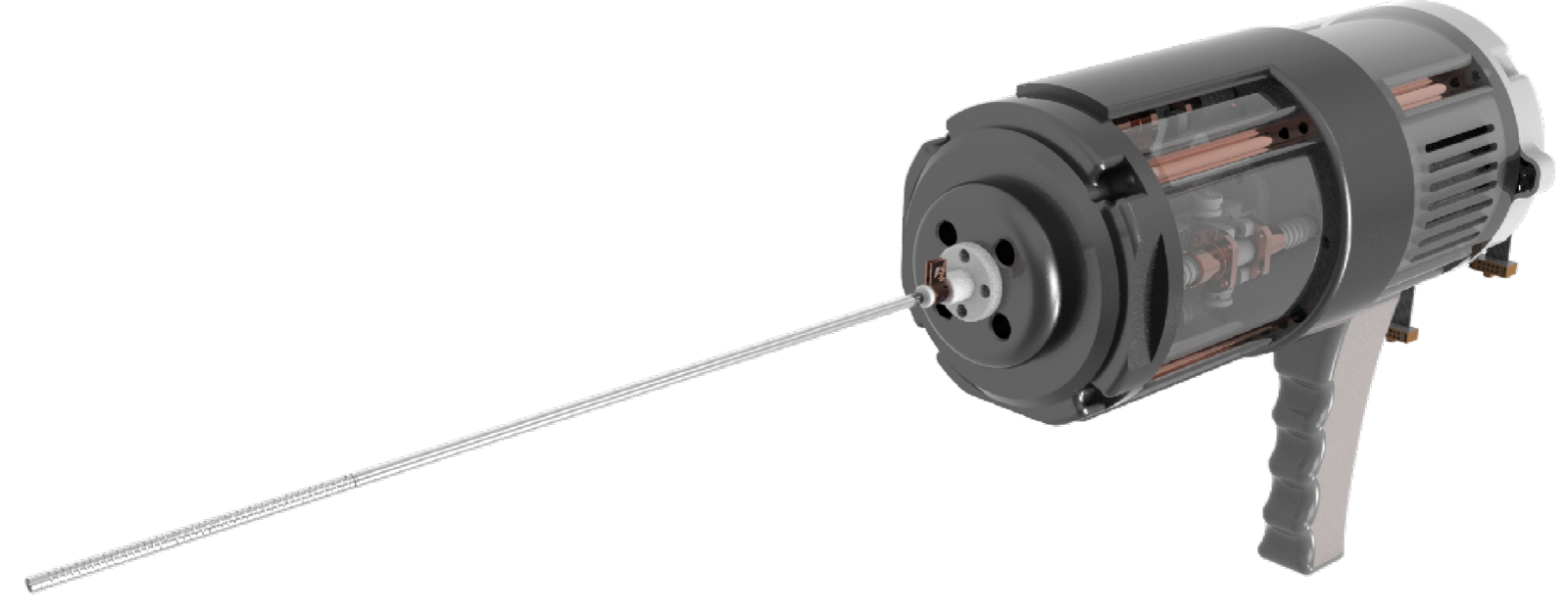
鼻窦柔性机器人高清内窥镜
发布时间:2024/12/25 14:13:44
| 项目简介 | |
|
本项目针对鼻窦的生理结构特性以及手术实际需求,开发一种鼻窦柔性机器人内窥系统,具有4自由度,两段独立弯曲,高清成像功能,以辅助医生判断病变组织,实现在疾病诊断和手术治疗等方面的应用。围绕上述研究目标,项目重点突破以下两大技术挑战:(1)基于鼻窦生理解剖结构模型的柔性机器人执行机构优化设计方法,解决内窥镜微型化问题,并实现实际手术需求与执行机构参数的匹配;(2)多传感器融合控制技术,实现术中内窥镜的精确弯曲运动,可高清准确采集病变区域图像,为医生提供高保真的病理信息。 |
|
 |
|
| 项目负责人 | |
| 曾文会 副教授 | |
 |
长期从事医疗手术机器人,柔性机器人研究;主持国家自然基金青年项目,国家重点研发计划子课题,以及湖北省重点研发计划(2023BCB085)子课题等项目。针对柔性机器人设计以及末端力学特性开展广泛深入研究,在国际权威期刊上发表SCI 10余篇,包括AMM,MMT以及RAL等国际顶尖期刊,申请多项发明专利。 |